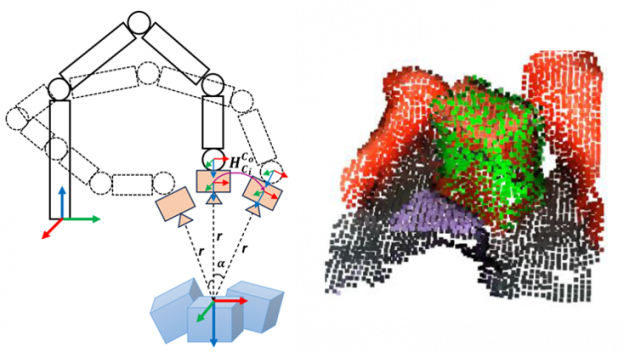
In his individual study and undergraduate thesis in 2023, Ahn Ho Tung (KAIST ME) conducted research to utilize multiple 3D shots to find objects for autonomous robotic bin picking. 3D depth sensors has measurements errors due to their optical limitation. He developed a method how the multiple shots for different angles by an affordable depth sensors with robot can minimize the position error of an object . Based on the method, the robot could improve success rate to pick up objects in random positions. In this study, ROS melodic is used to control the robot. YOLO AI model by Pytorch was used to find top object from a cluttered bin.